4.3. 【例題】ニュートン方程式¶
4.3.1. 方程式¶
ニュートン方程式を考えます。ここでは、重力に加えて、空気抵抗も考慮することにします。空気抵抗は速度に比例する逆向きの力として、 の形を仮定します。比例係数
の形を仮定します。比例係数  は物体の形や空気密度などに依存します。
は物体の形や空気密度などに依存します。
物体の座標  に関する方程式は
に関する方程式は
(1)¶
と書けます。以下では、力  は時間と座標に依らない定数とします。
は時間と座標に依らない定数とします。
連立1階微分方程式へ変形¶
ニュートン方程式は2階の微分方程式ですが、SciPyなど多くのライブラリは連立1階微分方程式  を解くように設計されています(常微分方程式の解法 を参照)
。そこで、ニュートン方程式を連立1階微分方程式の形に書き換えます。
を解くように設計されています(常微分方程式の解法 を参照)
。そこで、ニュートン方程式を連立1階微分方程式の形に書き換えます。
速度  を使うと、(1) 式は
を使うと、(1) 式は  と表されます。したがって、座標と速度を合わせた2成分ベクトル
と表されます。したがって、座標と速度を合わせた2成分ベクトル  を導入すると、(1) 式は
を導入すると、(1) 式は
(2)¶
の形の連立1階微分方程式となります。 この右辺をライブラリに与えて方程式を解きます。
2次元へ拡張¶
さて、1次元ではあまり面白くないので、2次元空間内の運動を解いて、軌道を図示することにします。水平右方向をx座標、鉛直上方向をy座標として、原点から、水平面との角度  で球を飛ばす状況を考えます。空気抵抗がなければ、
で球を飛ばす状況を考えます。空気抵抗がなければ、 の時に飛距離が最大になりますが、空気抵抗がある場合には、最適な角度は小さくなります。実際に球の軌道を描いて、確認してみましょう。
の時に飛距離が最大になりますが、空気抵抗がある場合には、最適な角度は小さくなります。実際に球の軌道を描いて、確認してみましょう。
(2) 式を2次元に拡張すると、 として
として
(3)¶
となります。 は重力加速度です。この方程式を解いていきます。
は重力加速度です。この方程式を解いていきます。
4.3.2. 実装¶
まずは、方程式 (3) の右辺を作ります。
10def f_newton(t, X, m, g, b):
11 # X = [x, v_x, y, v_y]
12 dXdt = np.array([
13 X[1], # dx/dt = v_x
14 -(b/m) * X[1], # dv_x/dt = -(b/m) v_x
15 X[3], # dy/dt = v_y
16 -(b/m) * X[3] - g # dv_y/dt = -(b/m) v_y - g
17 ])
18 return dXdt
関数の形は f(t,y) と決まっているので、第1引数の t は使わないですが省略できません。第2引数 X が4成分ベクトル  で、
3番目以降の引数
で、
3番目以降の引数 m, g, b はパラメーターです。この関数は、これら5個の引数を受け取り、(3) 式の右辺を計算して、4成分ベクトル  を返します。
を返します。
次に、方程式を解いて結果を返す関数を作ります。
21def solve_newton(eq_params, X0, t_range, n_t):
22 m, g, b = eq_params
23 t_start, t_end = t_range
24
25 # Solve ODE
26 sol = solve_ivp(f_newton, (t_start, t_end), X0, args=(m, g, b), dense_output=True)
27 print(sol.message)
28
29 # Get dense output for plot
30 t = np.linspace(t_start, t_end, n_t)
31 Xt = sol.sol(t)
32 assert Xt.shape == (4, n_t)
33
34 # x(t), v_x(t), y(t), v_y(t)
35 return Xt[0, :], Xt[1, :], Xt[2, :], Xt[3, :]
第1引数 eq_params は方程式のパラメーターをまとめたものです(関数の引数が多くなるのを避けるため)。eq_params は22行目で m, g, b に展開されます(unpackといいます)。第2引数 X0 は初期値です。第3引数 t_range は時刻の範囲で、第4引数 n_t が作図に使用する点の数です(方程式を解く際の時間刻みではありません)。
26行目:scipy.integrate.solve_ivp 関数を使って方程式を解きます(詳細は 常微分方程式の解法 を参照)。第1引数に先ほど作った関数 f_newton を与え、第2引数に初期時刻・終了時間、第3引数に初期条件を与えます。いま f_newton はパラメーターを3つ取る(3番目以降に引数が3つある)ように定義されているので、args にそれらの値を与えます。dense_output=True は作図用のデータを得るために指定しておく必要があります。
30~32行目:作図用のデータを取得します。まず、numpy.linspace で時刻の配列を作成し、この配列 t を、sol.sol(t) として先ほど得られた結果に与えると、各時刻での  が得られます。 が4成分なので、得られる結果
が得られます。 が4成分なので、得られる結果 Xt は4 × n_t のNumPy配列です。32行目:assert 文で Xt のサイズを確認しています。もし、この等式が成り立っていない場合は、AssertionError エラーでプログラムが止まります。
assert文は、プログラムの間違いを早期に発見するためでもありますし、コードを読む人(自分も含む)へのメッセージという意味もあります。
35行目:最後に、 の結果をそれぞれ1次元配列として返します。
の結果をそれぞれ1次元配列として返します。
さて、ここまで準備ができたら、パラメーターを与えて実際に方程式を解きます。
50def main():
51 # MKS units: m, kg, s
52 g = 9.8 # [m/s^2]
53 m = 0.1 # [kg]
54 b = 0.1 # [kg/s]
55
56 t_start = 0 # [s]
57 t_end = 5.0 # [s]
58 n_t = 101
59
60 # initial state
61 v0 = 100.0 / 3.6 # [m/s]
62 theta = 45 * (np.pi / 180) # radian
63
64 # X0 = [x0, v0_x, y0, v0_y]
65 X0 = np.array([0, v0 * np.cos(theta), 0, v0 * np.sin(theta)])
66
67 # Solve Newton equation
68 # x(t), y(t)
69 xt, _, yt, _ = solve_newton(eq_params=(m, g, b), X0=X0, t_range=(t_start, t_end), n_t=n_t)
図の描画部分は除いています。
51~62行目:パラメーターをMKS単位系で指定しています。野球ボールを投げることを想定して、質量m=0.1kg、初速度v0=100km/h、角度theta=45°としています(人が投げる程度の速さです)。空気抵抗係数は直感的に決めることが難しいですが、ここではb=0.1kg/sとしています。逆に、結果を見て、飛距離からbを決めると考えた方が良いかもしれません。時刻0秒から5秒までを n_t=101 分割した結果、つまり0.05秒間隔のデータが得られます(繰り返しですが、これは微分方程式を解く際の時間刻み幅ではありません)。
65行目:初期条件を設定しています。
69行目:方程式を解いて、 と  を受け取ります。
2番目と4番目の戻り値(
を受け取ります。
2番目と4番目の戻り値( と
と  )は今回は使わないので、アンダースコアで受け取っています。
慣例的に、使用しない戻り値はアンダースコアで受けることになっています。
)は今回は使わないので、アンダースコアで受け取っています。
慣例的に、使用しない戻り値はアンダースコアで受けることになっています。
4.3.3. 結果¶
スクリプトを実行すると、sol.message の出力が表示されます。微分方程式を解いた結果(ステータス)が文章として表示されます。
$ python3 newton.py
The solver successfully reached the end of the integration interval.
下図が結果です。空気抵抗のために横方向の速度が次第に遅くなり、最後は垂直に近い角度で地面に落下していることが分かります。
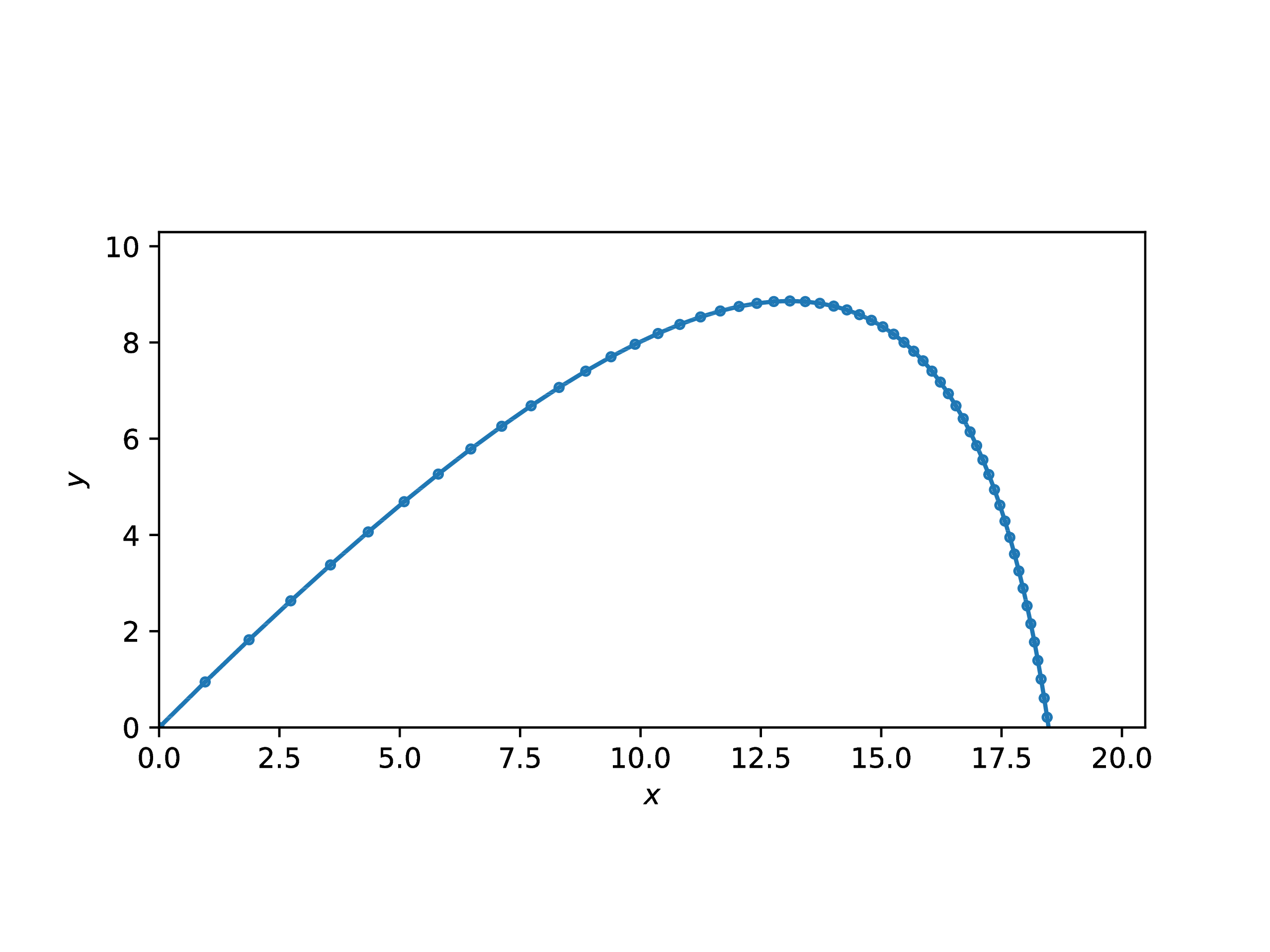
注釈
図ではy>0のみを図示していますが、実際の軌道はy<0まで続いています。例えば、球がy=0に到達した時点で計算をストップしたい場合、あるいは、y=0で球が跳ね返るような軌道を計算したい場合には、solve_ivp 関数の events オプションを使って、y=0に到達する時刻を検出します。詳細は公式ドキュメント scipy.integrate.solve_ivp を参照してください。
4.3.4. 角度依存性¶
さて、角度を変えて計算をしてみましょう。 次のスクリプトファイルを、先ほどのスクリプトと同じ場所においてください。
まずは、先ほどのファイルnewton.pyで定義した solve_newton 関数を使用するためにインポートします。
3from newton import solve_newton
角度を変えながら solve_newton 関数を繰り返し実行します。
21def main():
22 # MKS units: m, kg, s
23 g = 9.8 # [m/s^2]
24 m = 0.1 # [kg]
25 b = 0.1 # [kg/s]
26
27 t_start = 0 # [s]
28 t_end = 5.0 # [s]
29 n_t = 101
30
31 # initial state
32 v0 = 100.0 / 3.6 # [m/s]
33
34 # Results will be stored into a list as namedtuple
35 results = []
36 Result = namedtuple('Result', ['key', 'xt', 'yt'])
37
38 for theta_degree in range(5, 90, 5):
39 theta = theta_degree * (np.pi / 180) # radian
40
41 # X0 = [x0, v0_x, y0, v0_y]
42 X0 = np.array([0, v0 * np.cos(theta), 0, v0 * np.sin(theta)])
43
44 # Solve Newton equation
45 # x(t), y(t)
46 xt, _, yt, _ = solve_newton(eq_params=(m, g, b), X0=X0, t_range=(t_start, t_end), n_t=n_t)
47
48 # Store result
49 results.append(Result(str(theta_degree), xt, yt))
50
51 plot(results)
35行目:それぞれの角度における結果を保存するための空のリスト results を生成します。
36行目:, , をまとめて保存するために、collections.namedtuple を使って簡易クラス(C言語の構造体のようなもの)を定義しています。
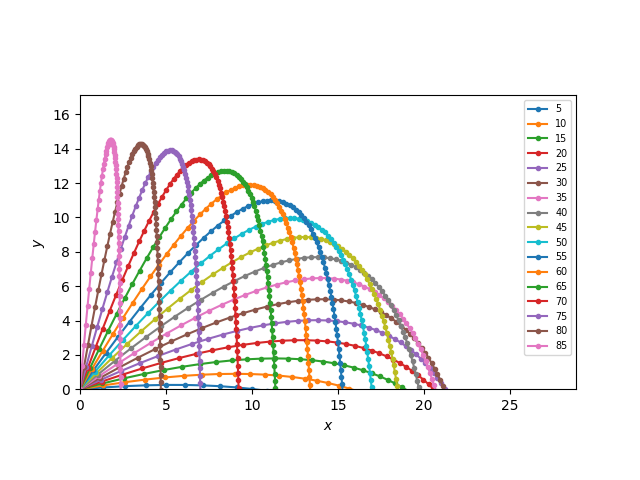
38行目:角度を5°から85°まで5度間隔でforループで回して、それぞれニュートン方程式を解きます。
49行目:計算が終わるたびに、先ほど定義したnamedtupleを使ってデータをひとまとめにしてリスト results に追加します。
さて、計算結果を全て得たら、最後に図を作ります。
7def plot(results):
8 fig, ax = plt.subplots()
9 for r in results:
10 ax.plot(r.xt, r.yt, marker='.', label=r.key)
11 ax.set_xlim(left=0)
12 ax.set_ylim(bottom=0)
13 ax.set_xlabel(r'$x$')
14 ax.set_ylabel(r'$y$')
15 ax.set_aspect('equal') # plot x and y in an equal scale
16 ax.legend(fontsize='x-small')
17 # fig.show()
18 fig.savefig("newton_angles.png")
9行目:forループを回して、異なる角度の結果を順に取得します。
10行目:結果はnamedtupleで保存してあるので、r.xt や r.yt のような記法でデータにアクセスできます。このように表記が分かりやすくなるのがnamedtupleの特長です。通常のタプルを使用した場合には、r[0] や r[1] のようにデータにアクセスするので、r[0] や r[1] がどのデータに対応しているのか一目ではわからず、間違いが生じやすくなります。
実行して得られた図は以下の通りです。角度が約30°の時に飛距離が最大になっています。